I research soft robotics, pneumatic actuators, and
haptic feedback systems that bridge the physical and
digital worlds. My projects explore how soft, flexible
materials can create intimate, responsive interactions
between humans and technology through material-driven
design approaches.
UNFLATABLES: Material-Driven Soft Robotics
My comprehensive exploration of inflatable
actuators as visual and haptic interfaces. I
investigated three fabrication
methods—heat-transfer vinyl, silicone casting,
and extruder heat fusing—to create programmable
soft materials that respond to pneumatic
control, focusing on biomimicry-inspired
movement patterns.
UNFLATABLES follows a material-driven design
approach where I explore soft robotics in wearable
contexts. The project investigates how different
materials and fabrication techniques create distinct
tactile experiences. I developed three
biomimicry-inspired movements—expansion, bending,
and twisting—that form the foundation for haptic
sensations replicating human-to-human interactions.
Biomimicry-Inspired Movement Patterns
Drawing inspiration from soft-bodied organisms like
octopi, elephant trunks, and jellyfish, I developed
a systematic vocabulary of movements achievable
through pneumatic actuation. Each movement pattern
serves different haptic communication purposes and
creates distinct user experiences.
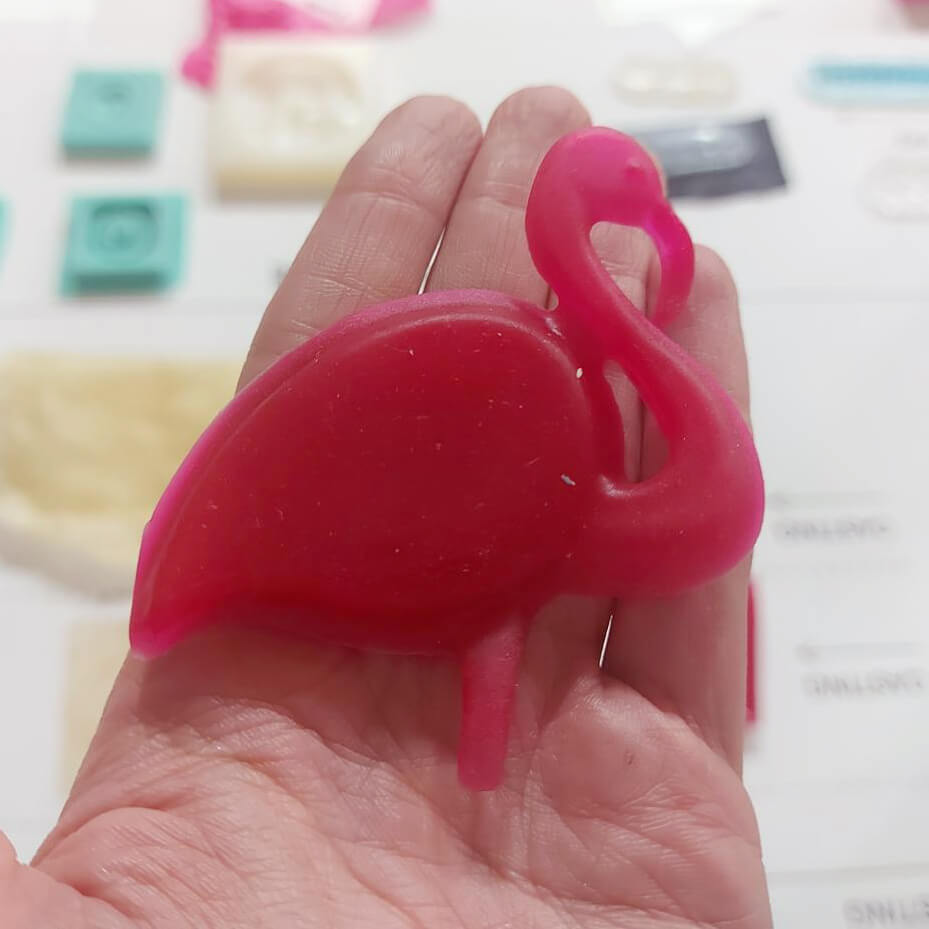
Material Exploration & Fabrication Methods
I systematically explored three primary fabrication
approaches, each offering unique material properties
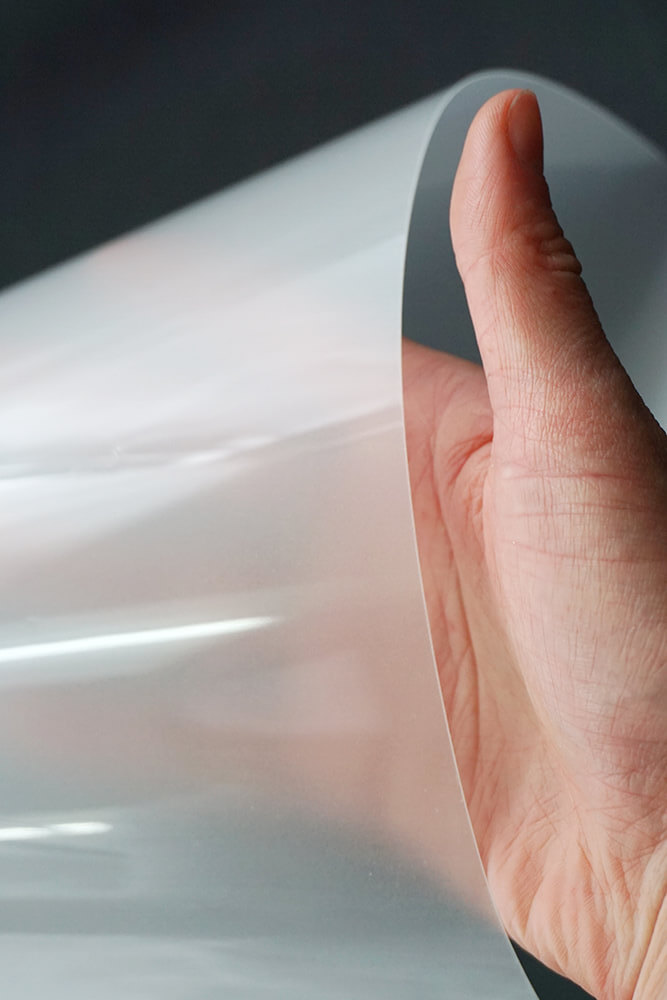
and interaction possibilities. Heat-transfer vinyl
enables rapid prototyping with varying textures,
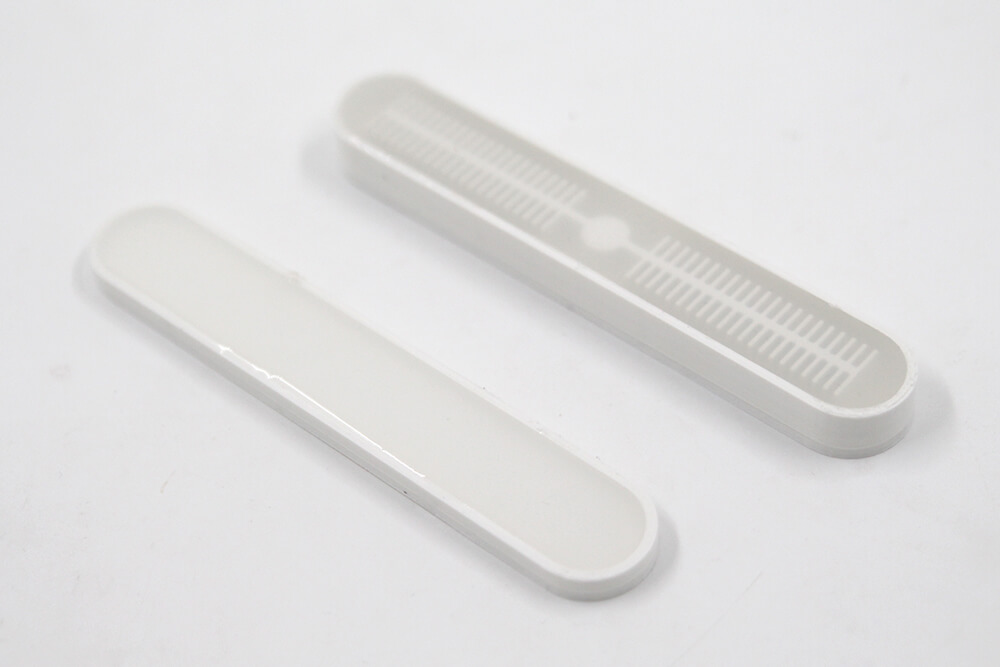
silicone casting allows complex 3D geometries with
biocompatible softness, and thermoplastic heat
fusing creates precise, thin actuators with
controlled stiffness characteristics.
Building on my UNFLATABLES research, I developed
an integrated wearable soft robotics system
featuring custom electronics, pneumatic
actuators, and wireless networking. The project
demonstrates advanced fabrication techniques
combining PCB design, sensor integration, and
material-driven interaction design for creating
responsive haptic interfaces.
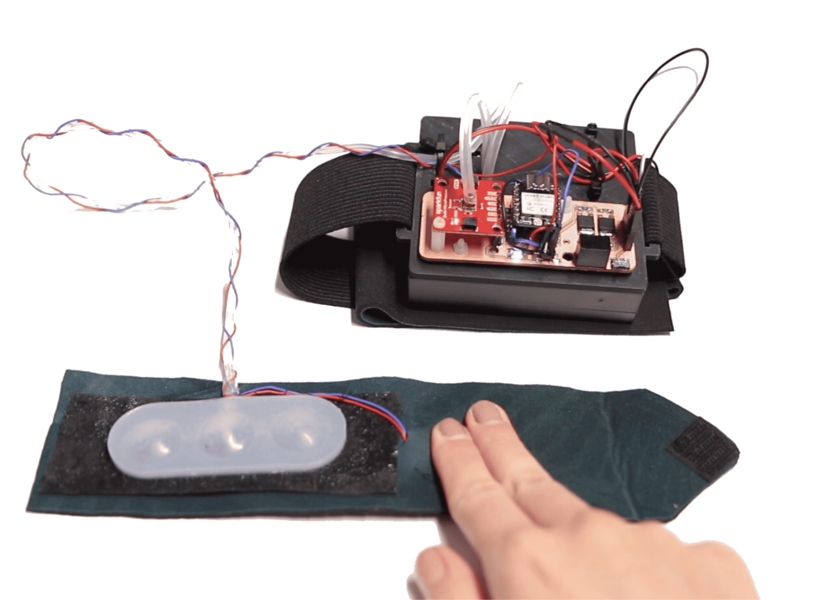
Haptic Heartstrings represents the evolution from
material exploration to fully integrated electronic
systems. I developed custom PCB designs, wireless
sensor networks, and pneumatic control systems to
create paired wearable devices that enable remote
haptic communication between users through soft
robotic actuators.
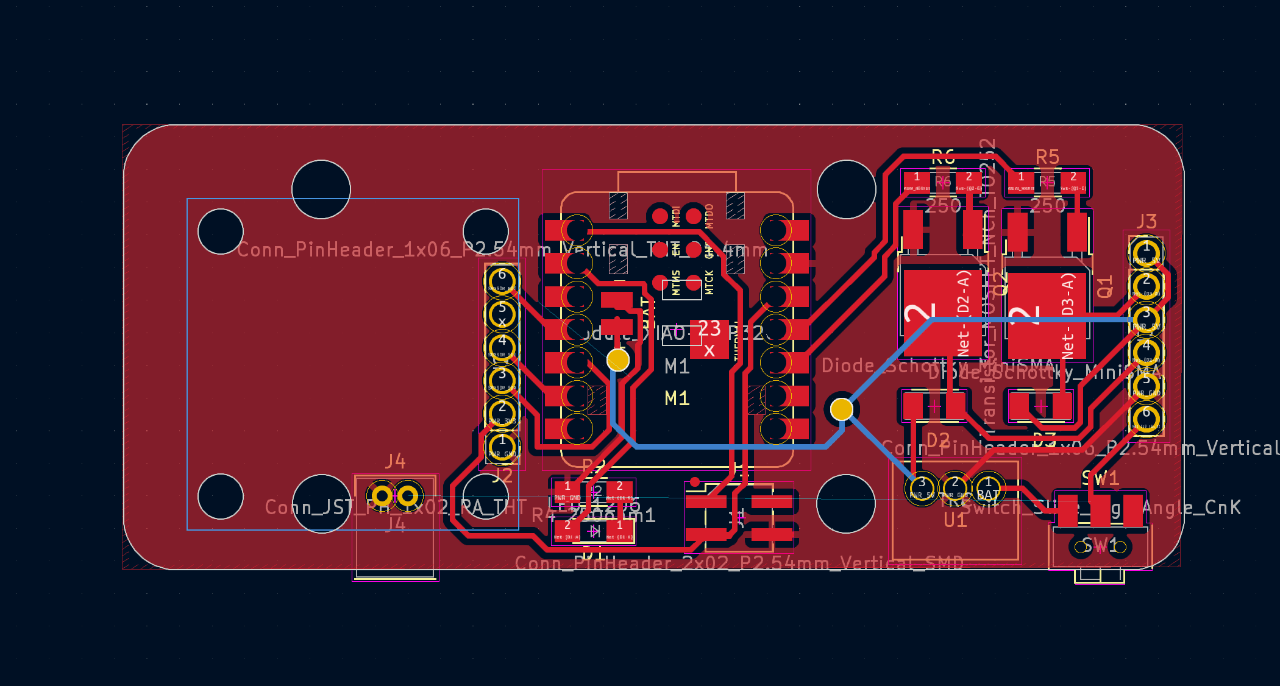
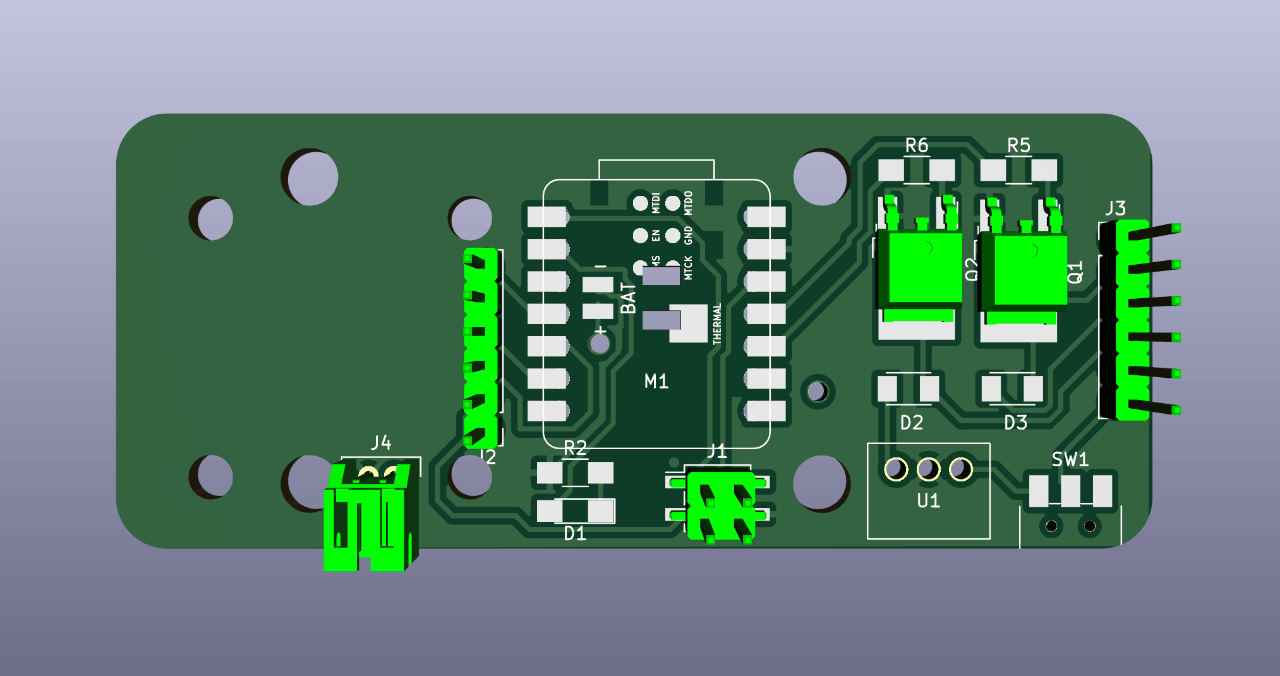
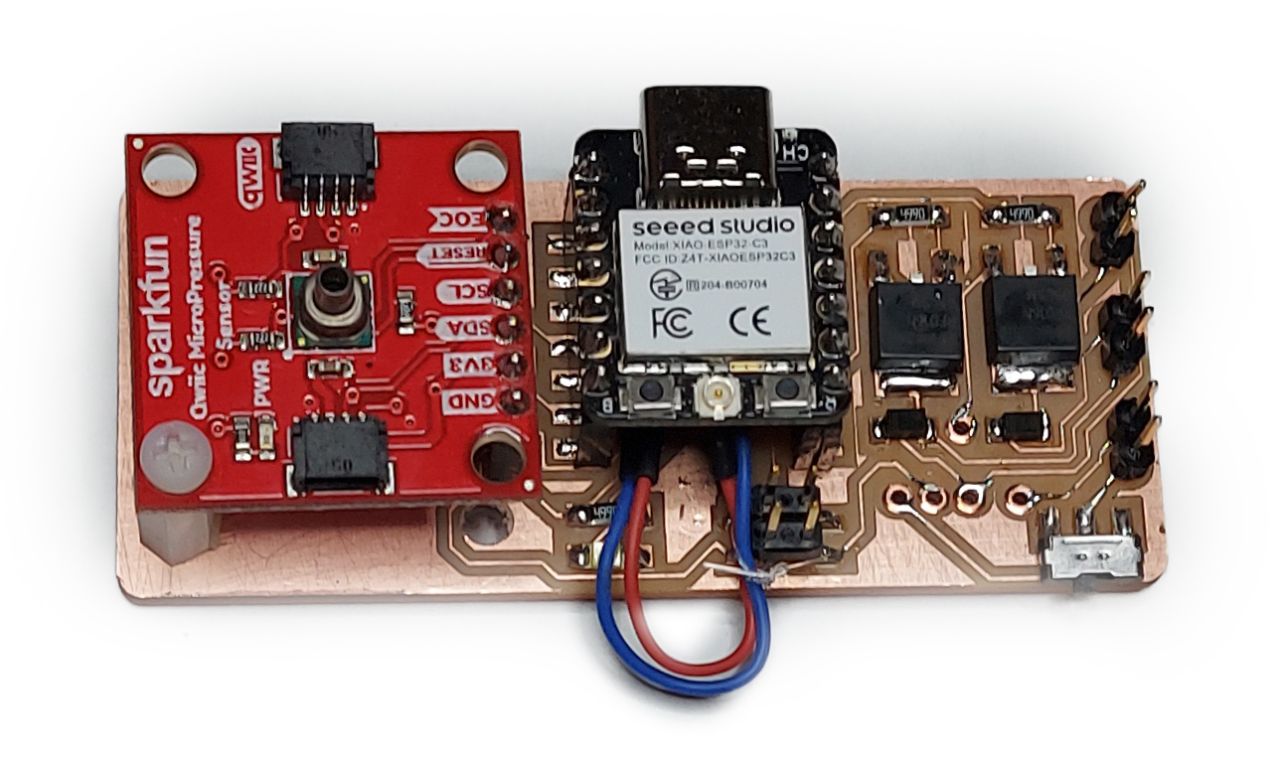
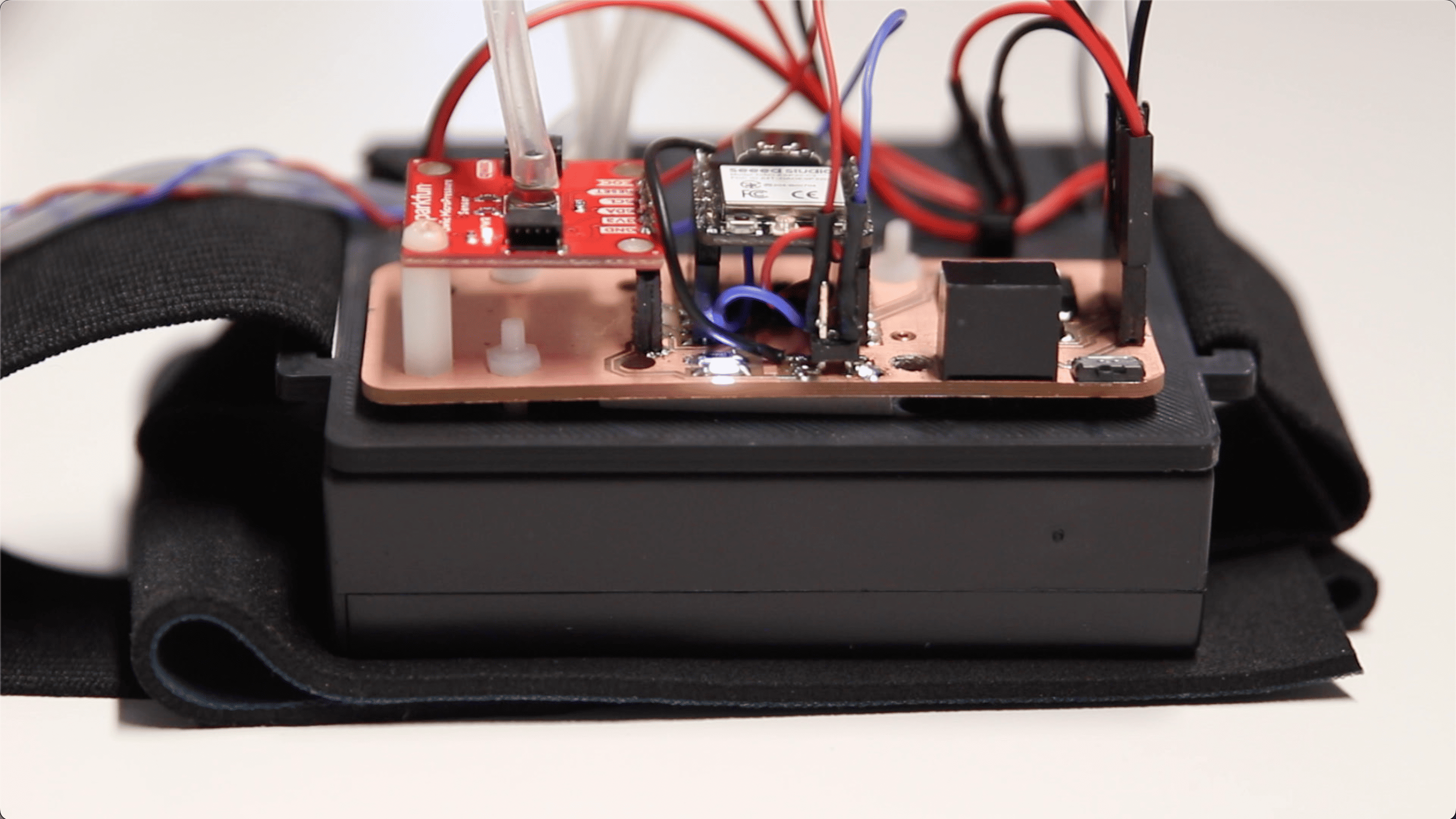
Custom Electronics & PCB Design
I designed and fabricated custom circuit boards
integrating Xiao ESP32-C3 microcontrollers, MOSFET
drivers for pneumatic control, and soft touch
sensors embedded in silicone. The electronics enable
wireless communication between devices and precise
control of pneumatic inflation patterns for varied
haptic experiences.
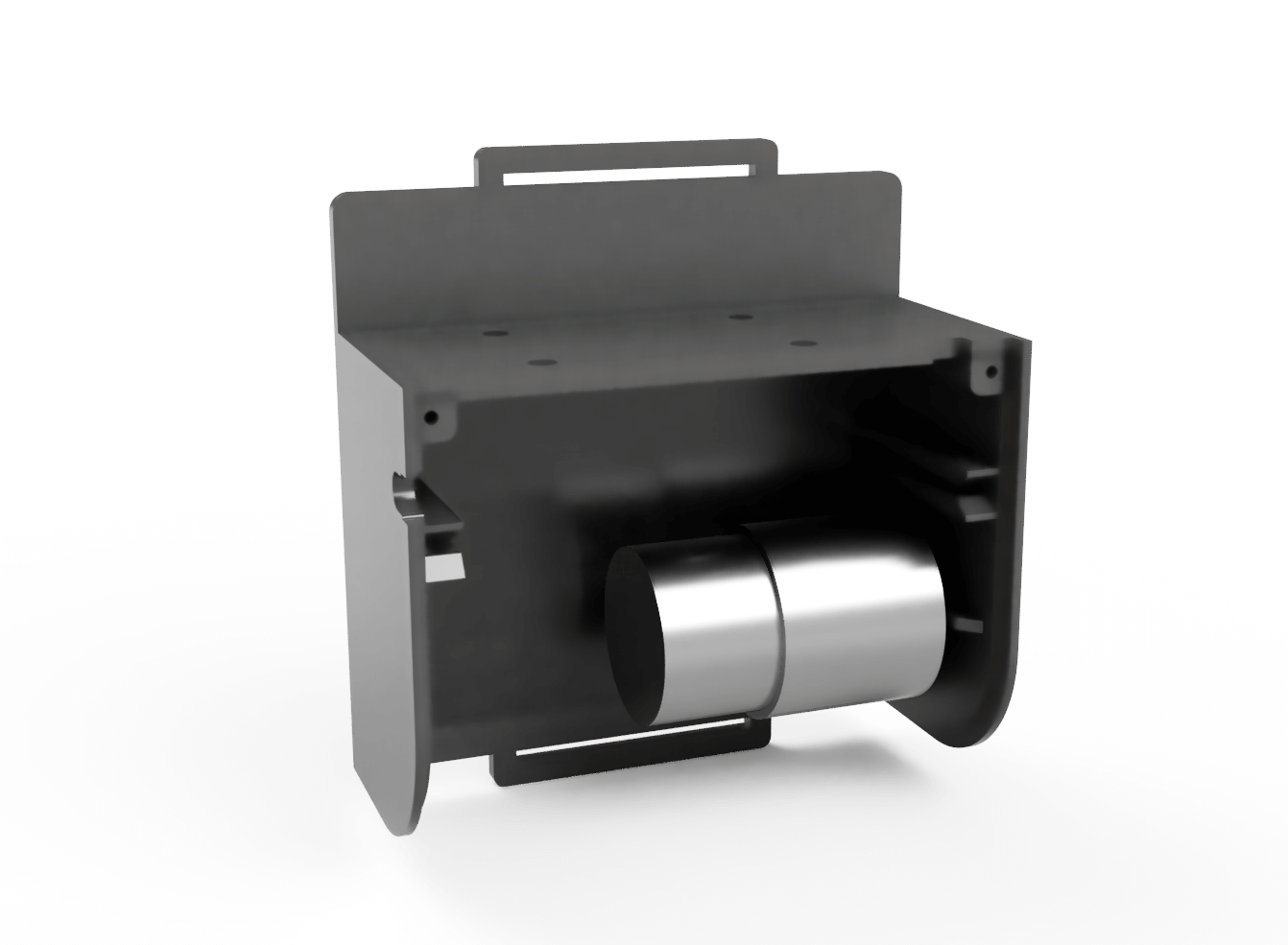
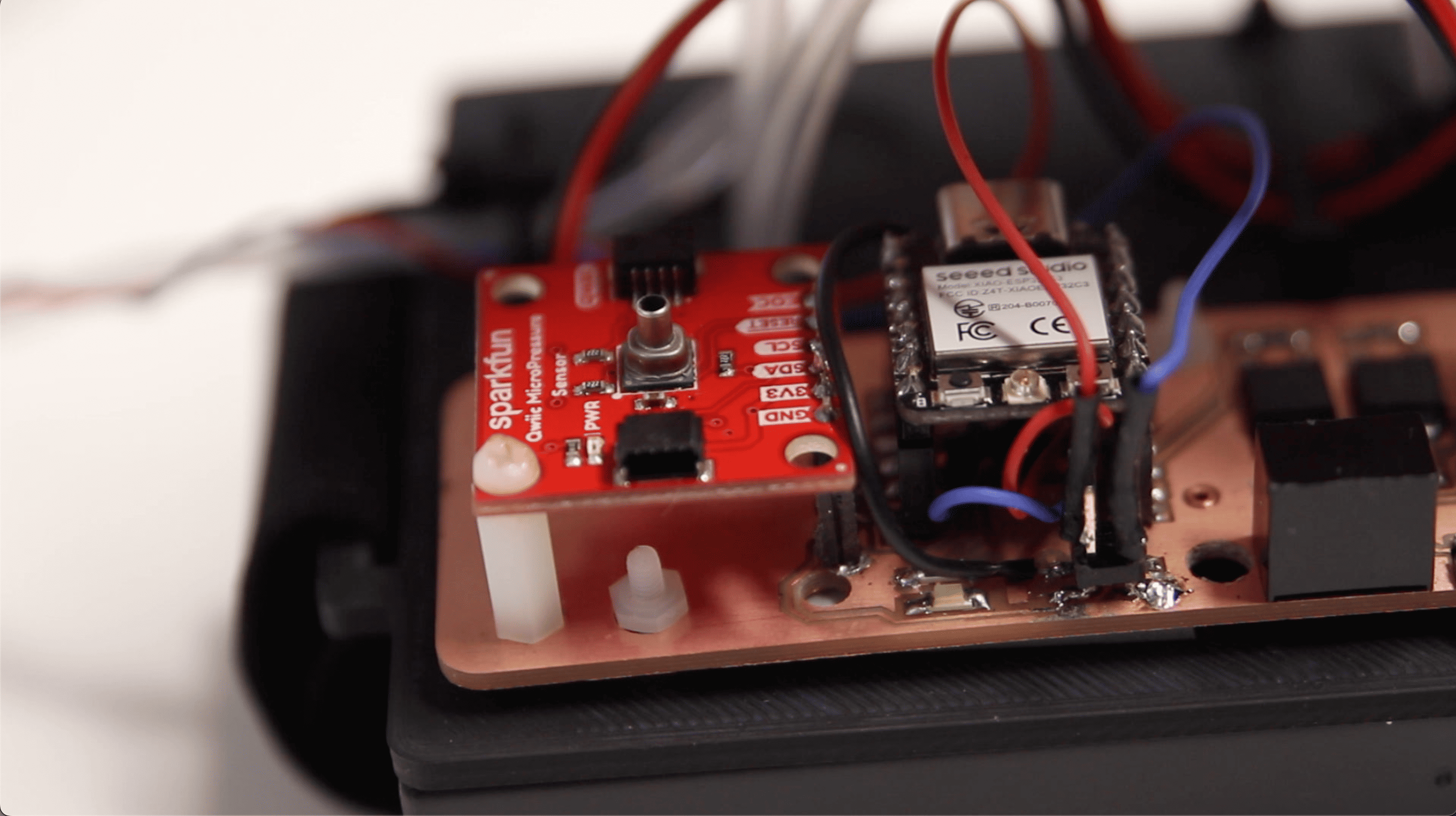
Pneumatic Systems & Wearable Integration
The system incorporates miniature air pumps
controlled through PWM signals, creating
programmable pressure sequences. I explored both
traditional pumps and experimental piezoelectric
microblowers, developing enclosure designs that
integrate electronics, pneumatics, and soft
actuators into comfortable wearable forms.
Wireless Communication & Control Interface
I developed WiFi-based networking protocols enabling
communication between paired devices and created
web-based control interfaces for adjusting system
parameters. The project demonstrates how soft
robotics can facilitate new forms of remote physical
interaction and emotional connection through
technology.
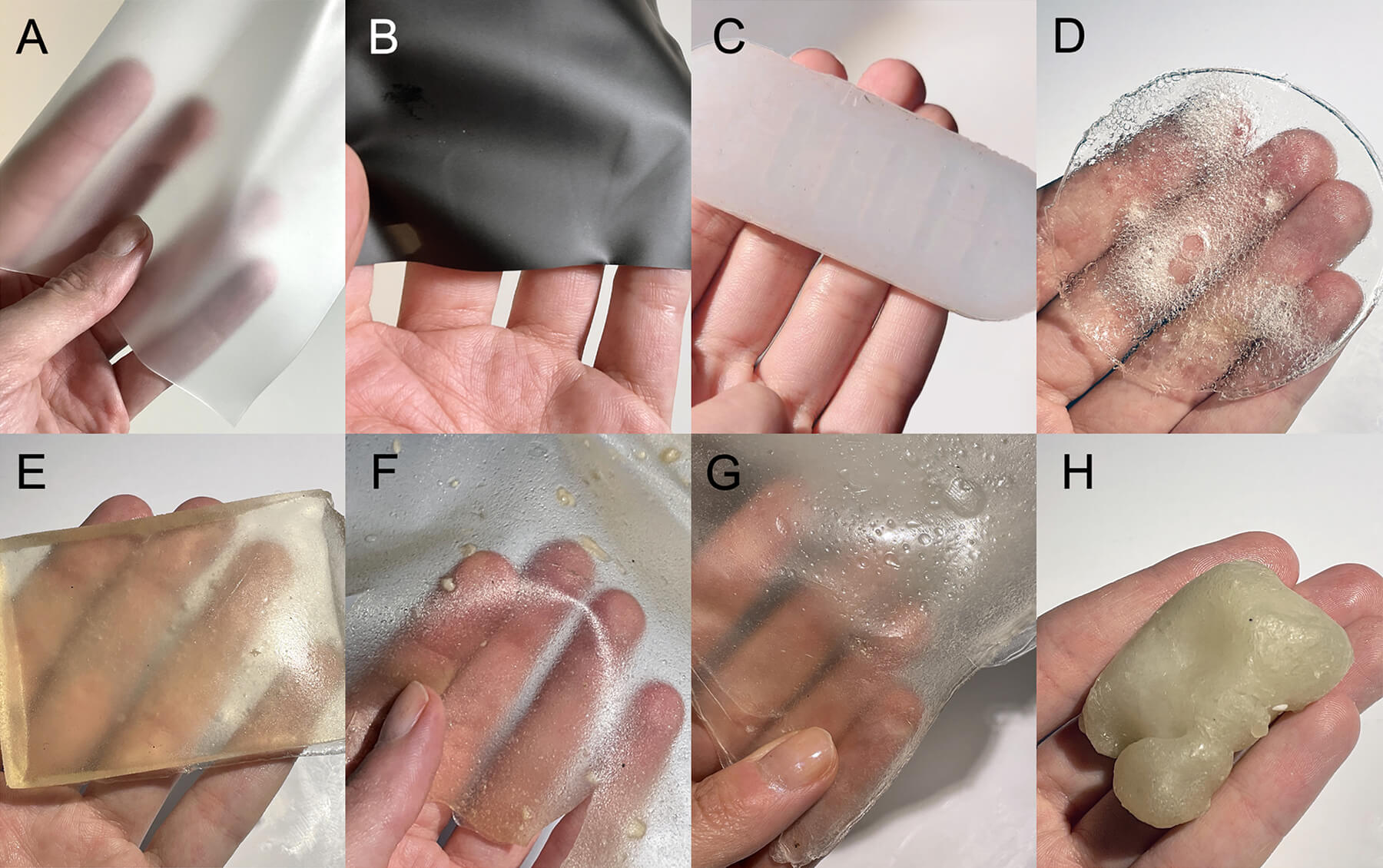
I explore biodegradable biopolymers like
gelatine, agar, and sodium alginate as
sustainable alternatives to vinyl and silicone
for prototyping haptic interfaces. This work
highlights the benefits of compostability,
organic textures, and accessibility despite
limitations in flexibility and durability.
In the context of growing importance of sustainable
research practices in HCI, I adopt a material-driven
design approach to propose biodegradable
biomaterials for prototyping soft robotics.
Biopolymers offer unique properties of organic
textures, compostability, accessibility and in some
cases reusability, making them valuable alternatives
for specific applications.
Sustainable Material Properties
While biopolymers have limited flexibility,
functional consistency and durability compared to
synthetic materials like vinyl or silicone, they
provide distinct advantages. I investigate how their
organic textures, environmental benefits, and
accessible fabrication processes can be leveraged in
soft robotics applications.
This research was presented at the
ACM Conference on Tangible, Embedded, and
Embodied Interaction (TEI) 2025, contributing to discussions about sustainable
practices in interaction design research.